《11.1杠杆》导学案(第2课时)
导学目标:
理解杠杆平衡条件,能通过实验探究总结出杠杆平衡条件.
导学过程:
【复习导入】复习回忆上节课所讲内容
【自主学习】仔细阅读课本P3-5页内容,并通过讨论初步了解杠杆的平衡条件和杠杆的分类,然后测
验一下你的自学效果.
1.杠杆的平衡条件是: .
2.杠杆可分成 、 、 三种.
【合作探究】
 活动一:探究杠杆的平衡条件
活动一:探究杠杆的平衡条件
1.杠杆平衡:杠杆处于 或 状态时称做杠杆平衡.
2.实验探究杠杆的平衡条件:
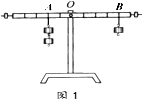
⑴实验装置:如图1所示:
⑵实 验步骤:
验步骤:
①调节杠杆在水平位置平衡.
②改变钩码个数和位置使杠杆再次平衡.
③设计表格记录数据
实验序号 |
动力F1/N |
动力臂l1/cm |
阻力F2/N |
阻力臂l2/cm[来源Z§X§X§K] |
1 |
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
(3)得出结论:杠杆的平衡条件是: 公式 .
活动二:杠杆的分类:
 1.当l1> l2 , F1 F2 , 称为 杠杆 例: 、
1.当l1> l2 , F1 F2 , 称为 杠杆 例: 、
2.当l1< l2, F1 F2, 称为 杠杆 例: 、
3.当l1= l2, F1 F2, 称为 杠杆 例:
活动三:生活·物理·社会
【精讲点拨】
1.在“探究杠杆平衡条件”实验中:
⑴实验前,先把杠杆的中点支在支架上,调节杠杆两端的平衡螺母,使杠杆在_________位置平衡.如果杠杆左边低右端高,则调节平衡螺母应向 移动.此后在整个实验过程中,是否还要再旋动两侧的平衡螺母? .(图中杠杆上每格距离相等)
⑵实验中,改变支点两侧的钩码位置和个数,一般要做三次实验,得到三组数据并进行分析,这样做的目
的是:_____________________________________ ________.
________.
⑶如图所示,杠杆处于平衡状态.如果在支点两侧的钩码下方分别再挂一个等重的钩码后,杠杆____________保持平衡(选填“能”或“不能”).
 【自主评价】
【自主评价】
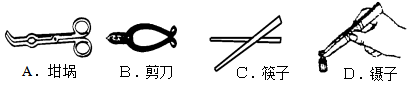
1.如图所示,下列器件中属于省力杠杆的是( )
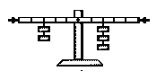
2.下图所示的工具中,使用时属于费力杠杆的是( )
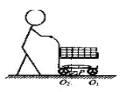
3.如图是超市里搬运货物的小推车,设货物均匀摆放在车内,当后轮O2遇到障碍物P时,顾客向上提起扶把,这时小推车( )
A.可视为省力杠杆,支点是前轮O1
B.可视为费力杠杆,支点是前轮O1
 C.可视为
C.可视为 省力杠杆,支点是后轮O2
省力杠杆,支点是后轮O2
D.可视为费力杠杆,支点是后轮O2
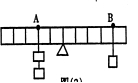
4.如图所示,一均匀杠杆A处挂2个钩码,B处挂1个钩码,杠杆恰好平 衡,若每个钩码质量均为50g,在A、B两处再各加一个钩码,那么:( )
衡,若每个钩码质量均为50g,在A、B两处再各加一个钩码,那么:( )
 A.杠杆仍平衡 B.杠杆左边向下倾[来源:学科网]
A.杠杆仍平衡 B.杠杆左边向下倾[来源:学科网]
C.杠杆右边向下倾 D.无法确定杠杆是否平衡
5.在处于平衡状态的杠杆上再加一力,杠杆仍处于原平衡状态,则( )
A.这力通过支点 B.这力在阻力一侧 C.这力在动力一侧 D.题设条件不可能存在
6.如图所示,一根重木棒在水平动力(拉 力)F的作用下以O点为轴,由竖直位置逆时针匀速转到水平位置的过程中,若动力臂为l,动力与动力臂的乘积为M,则( )
力)F的作用下以O点为轴,由竖直位置逆时针匀速转到水平位置的过程中,若动力臂为l,动力与动力臂的乘积为M,则( )
 A.F增大, l减小,M增大. B.F增大, l减小,减小.
A.F增大, l减小,M增大. B.F增大, l减小,减小.
C.F增大, l增大,M增大. D.F减小, l增大,M增大.[来源:学,科,网Z,X,X,K]
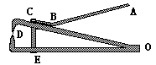
7.右图所示是一个指甲刀的示意图,它由三个杠杆A BC、OBD和OED组成,用指甲刀剪指甲时,下面说法正确的是( )
BC、OBD和OED组成,用指甲刀剪指甲时,下面说法正确的是( )
 A.三个杠杆都是省力杠杆
A.三个杠杆都是省力杠杆
B.三个杠杆都是费力杠杆
C.ABC是省力杠杆,OBD、OED是费力杠杆
D.ABC是费力杠杆,OBD、OED是省力杠杆
8.如图轻质杠杆(AO=OB=BC)上挂着150N的重物,为使杠杆水平
平衡,可采取的方法有:(1)在A点沿 方向加150N的力;(2)在 点沿竖直向上方向加150N的力;(3)在 点所加的力为最小,此力的大小是 N,方向是 .
9.甲乙两个实验小组在探究“杠杆的平衡条件”时,分别得到下面两组数据和结论.他们在交流时,甲组发现了自己实验结论的错误和产 生错误的原因.你认为甲组产生错误的原因有那些?
生错误的原因.你认为甲组产生错误的原因有那些?
甲 组 |
|
乙 组 |
次数 |
动力 |
动力臂 |
阻力 |
阻力臂 |
动力 |
 动力臂 动力臂
|
阻力 |
阻力臂 |
1 |
4 |
5[来源: |
5 |
4 |
7 |
4 |
2 |
14 |
2 |
3 |
4 |
4 |
3 |
6 |
4 |
8 |
3 |
3 |
|
|
|
|
4 |
5 |
2 |
10 |
 结论 结论
|
动力+ 动力臂=阻力+阻力臂 |
动力 动力臂=阻力阻力臂 动力臂=阻力阻力臂 |
甲组产生错误的原因:



